複雑形状ワークのバリ研削、
堰跡の切断・仕上げ。
エクシードの技術によって
その全てが可能に。
XTG登場。
バリ取り機XTGとは?
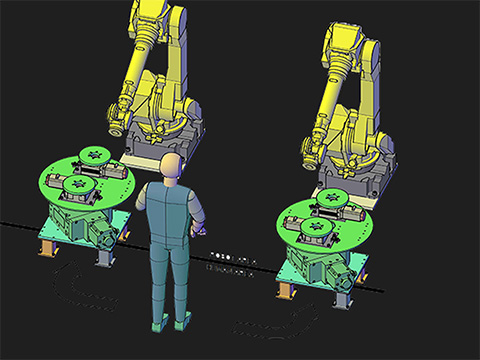
エクシードの独創的なコンセプトに基づいた信頼性の高い6軸ロボットとインデックステーブルとの組み合わせにより、自由度の高いフレキシブルな動きを実現。多彩なワークのバリ取りをこの1台で実現します。
開発背景/従来からの課題
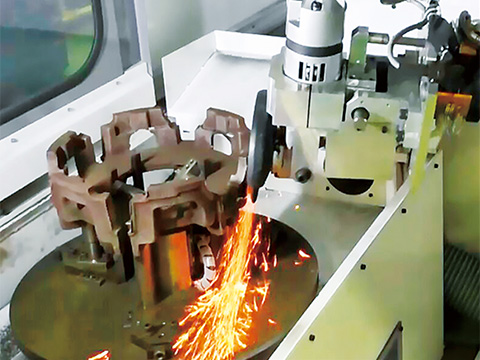
従来、FCやアルミなど金属のバリ研削や堰跡の切断は、研削機を用い人が直接一つ一つ加工するのが主流でしたが、切断・仕上げには多くの時間を費やし、キレイで均一な加工をすることは難しいといった課題から、これらが素材仕上げ加工における生産時のコスト高の要因のひとつとなっていました。
優位性

フローティングメカニズム
ロボットアーム先端のグラインダユニットにフローティングメカニズムを搭載。 グラインダユニットがスムーズな首振り運動を実現することで、バリの削りすぎを防ぐとともに過負荷による異常停止を防ぎます。

オート・ツール・チェンジャー(オプション)
プログラムによりワーク形状に最適なツールを自動で付け替えます。付け替えの手間や時間を省くことで作業工程を単純化。 作業の安全性を高めると共に不良率の低減につながります。
作業効率の促進
ロボットシステムならではの再現性により、寸法精度・表面粗さ・作業速度を保ったまま高品質に仕上げます。

クリーンな作業環境
作業者の健康を考慮した防塵・防音設計。メンテナンス性を重視した構造で掃除も簡単。
作業者に優しい機械です。

省エネルギー
使用するモーター数を最小限にし他のバリ取り機に比べ消費電力を大幅に削減。省エネかつランニングコストを低減。
設備

ロボット用バリ取り機
XCEED Robotics Grinder
XTG Series
(対象:FC / FCV / FCD / BC /AC)
ロボット最大可搬質量:35kg~70kg
ワーク質量(ワーク治具含む):5kg~70kg
ワークサイズ:
最大400mm or Φ500mm ×H300mm 以下
| 仕様 | XTG-35 | XTG-50 | XTG-70 | |
|---|---|---|---|---|
| 機械 | ロボット最大可搬質量 | 35kg | 50kg | 70kg |
| ワーク質量 (ワーク治具含む) | 1-30kg | 1-50kg | 1-70kg | |
| 最大ワークサイズ | 400 mm もしくは φ500 mm x H 250 mm | |||
| ハンドリングロボット | 6 軸垂直多関節ロボット | |||
| ロボット保持対象 | グラインダ・ユニット | |||
| ワークテーブル自由度 | 1 | |||
| ロボット自由度 | 6 | |||
| 総合自由度 | 7 | |||
| グラインダ・モータ | 900 W スピンドルモータ | 2.2 Kw ~ 3.7 Kw スピンドルモータ | ||
| モータ・スピード制御 | インバータ制御 | |||
| グラインダ・サポート方式 | フレキシブル・サポート | |||
| グラインダ・ディスク | φ180 mm x T6 mm | |||
| 補助ディスク (オプション) | φ180 mm 以下 | |||
| 安全装置 (オプション) | ディスク異常振動検知装置 | |||
| ツール・チェンジ方式 (オプション) | 全自動ツール・チェンジ | |||
| コントローラ | 三菱 Q – シリーズ DC 24 V | |||
| 設備 | 本体質量 | 約 3 ton | 約 3.5 ton | |
| 電力消費量 | 最大 10 Kva (8 Kw) | 最大 15 Kva (12 Kw) | ||
| エア圧力 | 最小 0.4 Mpa. | |||
| エア流量 | 2.5 Nm³ / Min | |||
